Stimulators
The Exeter group has developed several touch stimulators involving an array of vibrating contactors on the skin, each contactor independently controlled to allow spatiotemporal patterns of virtual touch sensation to be created on the fingertip. Control of the spatial distribution of tactile stimulation on the skin is important for the creation of realistic virtual touch sensations (e.g., to represent edges, corners and surface textures). When using a stimulator array to create virtual tactile sensations, the intention is not to use the array to reproduce the topology of "real" surfaces; the goal is to produce an appropriate excitation pattern over the various populations of mechanoreceptors in the skin. The spatial resolution required for the contactor array is related to spatial acuity on the fingertip, which is around 1 mm. We suggest [1] that 2 mm spacing of contactors is adequate for many purposes.
In order to achieve a "true" representation of a virtual tactile surface it is in principle necessary to present signals to the skin which contain all the frequency components which would be present in the "real" situation. However, tactile frequency resolution is poor – this suggests the possibility of using a low-resolution representation of the tactile spectrum based on only a few, widely spaced, frequency components. In her 1989 paper, Lynne Bernstein demonstrated that the spectrum can be reduced to only two sine wave components, providing these are chosen to separately target pacinian and non-pacinian receptors. This two-component strategy has been used in many of our experiments at Exeter, using stimulation with mixtures of sine waves at 320 Hz (pacinian channel) and 40 Hz (non-pacinian channel). Anecdotal reports suggest that the user is unaware of the discrete nature of the tactile spectrum – the 320 Hz and 40 Hz signals combine to give a realistic overall sensation, with the 40 Hz component suggesting the gross surface topology and the 320 Hz component suggesting a "tickly" or "hairy" aspect of the surface. Surprisingly, 320 Hz stimulation appears (subjectively) to be better localised on the skin than 40 Hz stimulation, suggesting that in this context the spatial resolution of the sense of touch is better at higher frequencies – experimental results [2, 3, 4] are consistent with this.
Various stimulators are shown below; they all make use of drive mechanisms based on piezoelectric bimorphs.
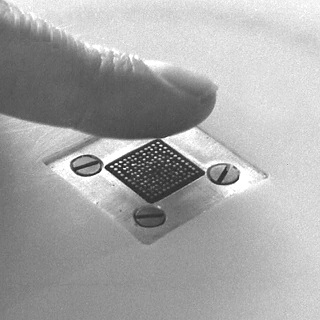
This stimulator was built by Craig Chanter. It has 100 moving contactors in a 10 × 10 array, surrounded by 44 fixed contactors, with 1 mm spacing. It has been used in a range of experiments [2, 3, 5] with passive presentation of stimuli (i.e., the positions of the stimulator and the user's finger are fixed).
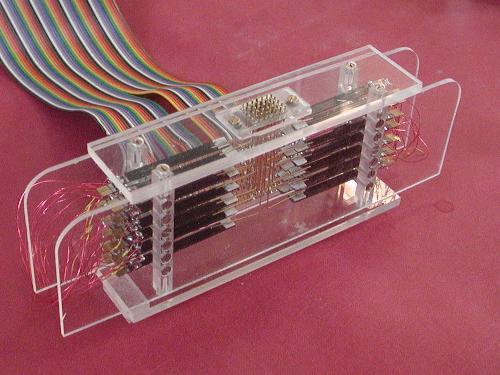
These five stimulators were built by Alan Brady. Each has 25 moving contactors in a 5 × 5 array, surrounded by 24 fixed contactors, with 2 mm spacing. They can be used individually, or as set to stimulate all 5 digits of one hand. Active presentation of stimuli is possible, i.e., if the user's finger moves then the stimulator can move with it (with the possibility of specifying the stimuli in real-time according to the movements of the user). A very similar stimulator, also built by Alan Brady, was used in the line-tracing experiments described on the Virtual Touch 1 page. One of these stimulators has been modified by Amer Alhussain for a functional MRI study at Exeter [6] involving point stimuli moving over the fingertip with various trajectories.
REFERENCES
[1] IR Summers, AC Brady, MK Syed, CM Chanter; Design of Array Stimulators for Synthetic Tactile Sensations; Proc. WHC05 (IEEE World Haptics Conference), Pisa (2005) pp 586-587 view pdf
[2] IR Summers, CM Chanter; A broadband tactile array on the fingertip; Journal of the Acoustical Society of America 112 (2002) pp 2118-26
[3] IR Summers, CM Chanter, AL Southall, AC Brady; Results from a Tactile Array on the Fingertip; Proc. Eurohaptics 2001, Birmingham (2001) pp 26-28 view pdf
[4] IR Summers, AC Brady; Psychophysics experiments on a tactile renderer; Proc. Materials & Sensations 2008, Pau (2008) pp 39-42 view pdf
[5] IR Summers, ST Francis, RW Bowtell, FP McGlone, M Clemence; A functional-magnetic-resonance-imaging investigation of cortical activation from moving vibrotactile stimuli on the fingertip; Journal of the Acoustical Society of America 125 (2009) pp 1033-1039
[6] AQ Alhussain, A Benattayallah, J Fulford, IR Summers; Discrimination of tactile trajectories on the fingertip: an fMRI study; 29th Annual Scientific Meeting of the ESMRMB, Lisbon (2012) view pdf

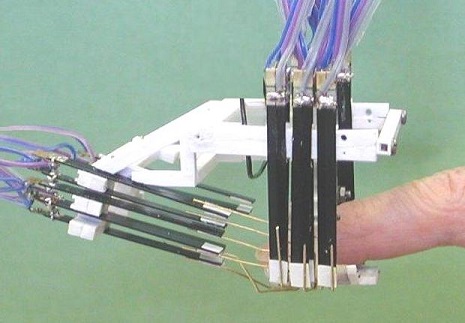
This stimulator is one of two similar, built by Alan Brady and Jianguo Qu for the HAPTEX project (see the HAPTEX page). It was designed to present virtual surface textures in response to active exploration of a 2D workspace by the user. It has 24 moving contactors in a 6 × 4 array with 2 mm spacing, set within a 7 × 5 array of fixed contactors. This stimulator has been used in an investigation of virtual textures by Alan Brady [4], and a project on virtual textiles by Matt Philpott (see the Virtual Touch 2 page). After feedback from a public demonstration as part of the latter project, Matt fitted caps to the moving contactors to increase their surface area and so improve user comfort.
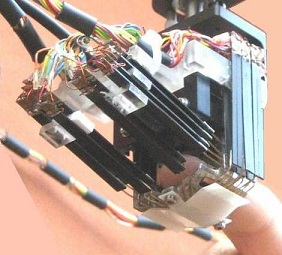
These stimulators, a prototype (above) and four final units (one shown, below) were built by Alan Brady and Jianguo Qu for the HAPTEX project (see the HAPTEX page). They are designed to present the surface textures of virtual textiles in a 3D workspace, in response to active exploration by the user with index finger and thumb. Each has 24 moving contactors in a 6 × 4 array with 2 mm spacing, arranged within a set of fixed contactors. This stimulator differs from the others on this page because the piezoelectric actuators are positioned to leave a free space below the contactor area, so that the index finger and thumb can be brought together when fitted with stimulators (to grasp the virtual textile).