Virtual Touch 2
This page describes the evaluation of a tactile renderer that produces virtual tactile surfaces to represent a variety of textiles. Results suggest that the various virtual textiles are indeed “textile-like” and can be discriminated from each other. The hardware and software were originally developed by Alan Brady, Qu Jianguo, Dennis Allerkamp and Ian Summers. The system was further developed by Matt Philpott, who also carried out the evaluation. These results were presented at the 2013 Euromov Conference in Montpelier, France. This research was supported by the UK Engineering and Physical Sciences Research Council and the UK Arts and Humanities Research Council.
INTRODUCTION
The tactile renderer produced during the EU-funded HAPTEX project produces a virtual representation of the surface “feel” of different textiles, generated in real time in response to active exploratory movements over the virtual surface. This renderer has been subject to further development, including investigations of the match between virtual textiles and “real” textiles. Implementation within a 3D workspace may be envisioned, as in the HAPTEX project, but in the present study a 2D workspace is used, for simplicity.
HARDWARE AND SOFTWARE
Tactile stimulation is delivered via a 24-contactor vibrotactile array on the fingertip (6 × 4 array with 2 mm spacing, piezoelectric actuators). Drive signals, individually specified for each of the contactors in the array, are derived from a software model of each textile, based on data from Kawabata measurements on the corresponding “real” textile. Each drive signal is a composite sine waves at 40 Hz and 320 Hz, with amplitudes calculated in real time in response to exploration of the workspace.
Click here for a YouTube video of the system in use
METHOD
Virtual textiles were selected to cover a full range of amplitudes of the high and low-frequency components (Fig. 1), calculated for a typical speed of exploration (10 cm/s).
Two experiments were conducted in which subjects were presented with a series of virtual environments, each containing four virtual textiles, and were asked to select the virtual textile which was most similar to the target. The target was a real textile in the first experiment (Fig. 2) and a virtual textile in the second experiment. In each experiment, subjects repeated this task 80 times (5 different virtual environments for each of 16 targets).
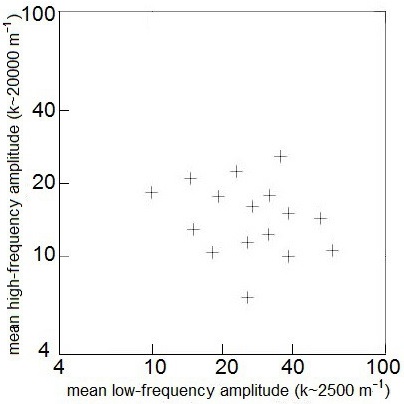
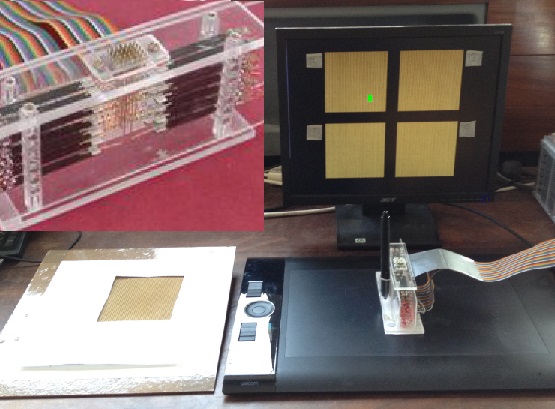
Fig. 1. The virtual textiles, in terms of components at low and high spatial frequencies (k=2π/λ) in their surface profiles.
Fig. 2. The setup used in this study, including a graphics tablet to provide position and velocity information for the tactile renderer, and a screen to help the user navigate the virtual environment. The tactile display (top left insert) is a 24-contactor vibrotactile array.
RESULTS
A first experiment investigated subjects’ ability to match a real textile to the corresponding virtual textile. The average success rate over 8 subjects was only 41.3±1.6% (chance score 25%), with two highly practised subjects (the authors) achieving an average score of 50%.
Subjects’ anecdotal comments suggested that the virtual textiles were, in general, “textile-like”; however, it was difficult to find a match between a particular real textile and a virtual textile.
In a second experiment, subjects were asked to match a virtual textile to itself (one-from-four choice). The average success rate over 8 subjects was 64.1±5.5%, with the two highly practised subjects achieving an average score of 91%.
CONCLUSIONS
Results from the first experiment are significantly lower than those from the second experiment. It may be concluded that the renderer produces a range of distinguishable “textile-like” surfaces, but the Kawabata data do not provide a basis to accurately represent a particular textile.
TECHNICAL DETAILS
Kawabata measurements provide roughness profiles of the textile surface in the four principal directions, from which local spatial spectra are calculated for points on the surface at 1 mm resolution. For each contactor in the array, at a known position on the surface, the appropriate spatial spectra are converted to temporal spectra on the basis of exploration speed in the warp and weft directions. Band-pass filters reduce these temporal spectra to two amplitudes at 40 Hz and 320 Hz which specify the drive signal to the contactor.
Click here for a short video clip (mp4) from a 2014 BBC TV programme
PUBLICATIONS
Matthew Philpott, Ian R Summers & Dennis Allerkamp; Characteristics of a tactile rendering algorithm. Proc. Joint VR Conference 2011, Nottingham, Sept 2011, pp 77-79 view pdf
Matthew Philpott & Ian R Summers; Evaluating a Multipoint Tactile Renderer for Virtual Textured Surfaces. Lecture Notes in Computer Science 7283, 2012, pp 121-126 (Proc. Eurohaptics 2012, Tampere) view pdf
Linda Hurcombe, Mark Wright, Alison Sheridan & Ian Summers; Touching the past: Investigating sensory engagement and authenticity in the provision of touch experiences in museums across a range of media. Proc. AHRC Conference Sustaining the Impact of UK Science and Heritage Research, London, Oct 2013, pp 59-60
Matthew Philpott & Ian R Summers; Surface-Roughness-Based Virtual Textiles: Evaluation Using a Multi-Contactor Display. IEEE Transactions on Haptics 8, 2015, pp 240-244 view pdf
PUBLIC EVENTS
Members of the public were able to try the virtual textile system in a display of an archaeological textile, the Falkirk tartan, at the National Museums of Scotland in Edinburgh (January 2011 and September 2013) and the Orkney Museum in Kirkwall (September 2013).
Click here for a YouTube video of the display in Edinburgh